Moving the Robot Arm
Follow along: Basic Robot Arm Movement
The program launching process along with parameter settings are all simplified and set up on the Jupyter Notebook Environment.
- Open the 05_01_left_right.ipynb Jupyter Notebook
- Load Arm_Lib module and register the robot arm as an object
- Follow and Execute the example codes
(The Jetson Board used for these examples are => Jetson Nano)
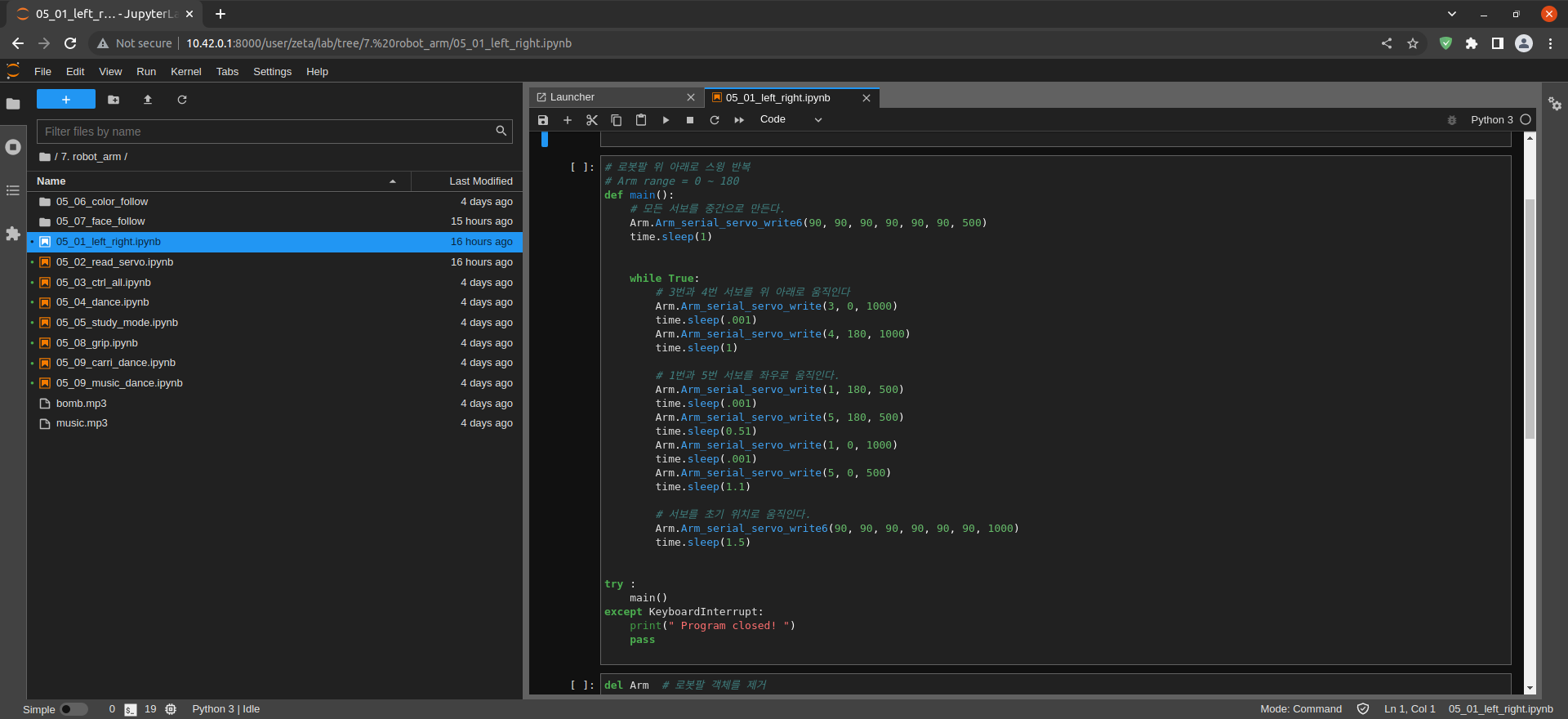
05_01_left_right.ipynb
- Running the cell codeCtrl + Enter
Load Arm_Lib module and register the robot arm as an object
#!/usr/bin/env python3
#coding=utf-8
import time
from Arm_Lib import Arm_Device
# Register robot arm as an object
Arm = Arm_Device()
time.sleep(.1)
Run the below cell within your jupyter notebook.
# Repeat swinging the robot arm up and down
# Arm range = 0 ~ 180
def main():
# Initialize all servos to the middle.
Arm.Arm_serial_servo_write6(90, 90, 90, 90, 90, 90, 500)
time.sleep(1)
while True:
# Move servos 3 and 4 up and down
Arm.Arm_serial_servo_write(3, 0, 1000)
time.sleep(.001)
Arm.Arm_serial_servo_write(4, 180, 1000)
time.sleep(1)
# Move the 1st and 5th servos left and right.
Arm.Arm_serial_servo_write(1, 180, 500)
time.sleep(.001)
Arm.Arm_serial_servo_write(5, 180, 500)
time.sleep(0.51)
Arm.Arm_serial_servo_write(1, 0, 1000)
time.sleep(.001)
Arm.Arm_serial_servo_write(5, 0, 500)
time.sleep(1.1)
# Move servo to initial position.
Arm.Arm_serial_servo_write6(90, 90, 90, 90, 90, 90, 1000)
time.sleep(1.5)
try :
main()
except KeyboardInterrupt:
# Move servo to initial position.
Arm.Arm_serial_servo_write6(90, 90, 90, 90, 90, 90, 1000)
print(" Program closed! ")
pass
Remove the robot arm object
del Arm # Remove robot arm object