IMU
Follow along: IMU Sensor Operation Example
The program launching process along with parameter settings are all simplified and set up on the Jupyter Notebook Environment.
- Open the 01_03_imu.ipynb Jupyter Notebook
- Import the necessary python libraries and modules
- Follow and Execute the example codes
(The Jetson Board used for these examples are => Jetson Nano)
Open the following jupyter notebook:
01_03_imu.ipynb
To run the cells within the notebook use Ctrl + Enter
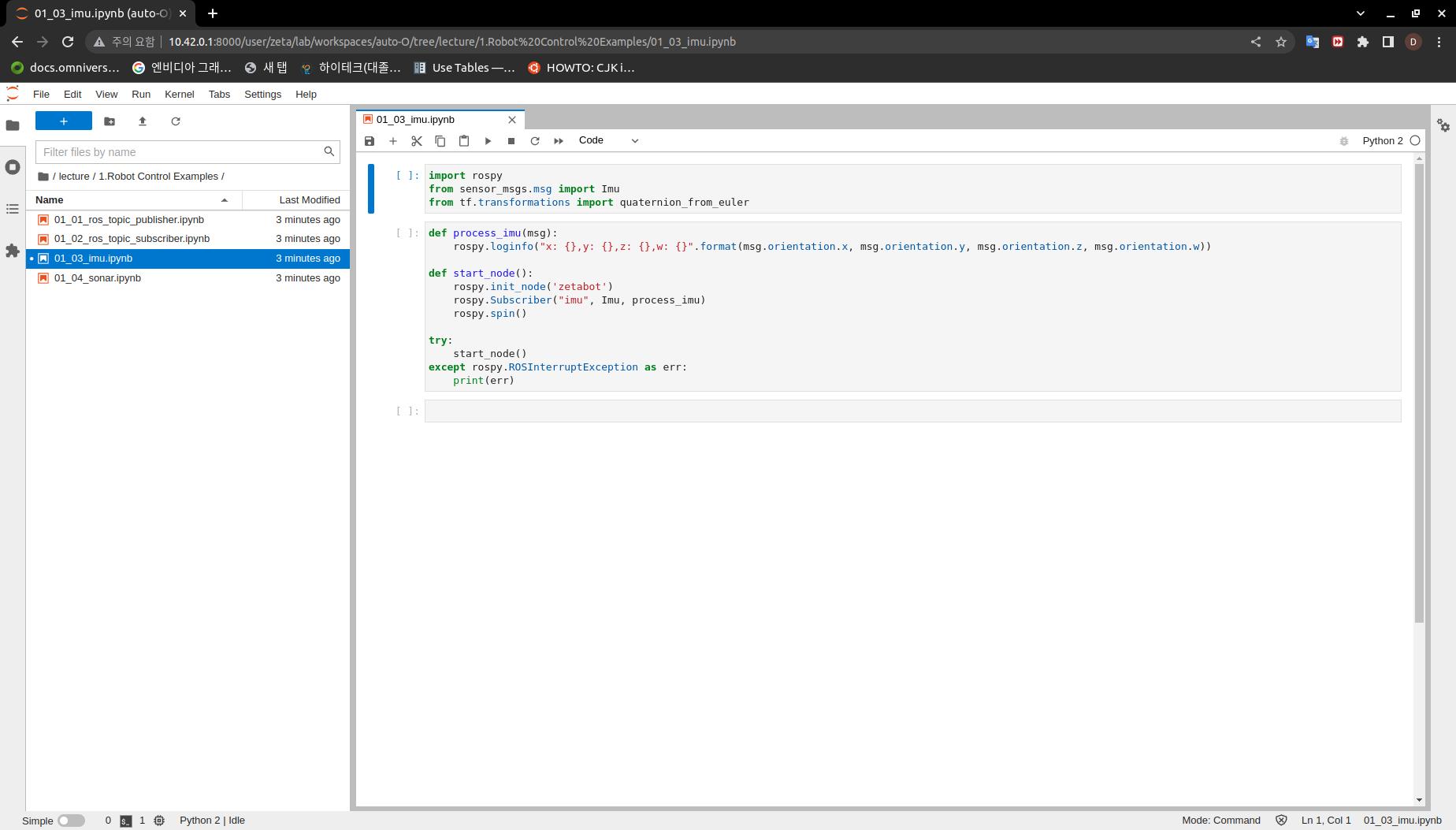
Import the necessary python libraries and modules
import rospy
from sensor_msgs.msg import Imu
from tf.transformations import quaternion_from_euler
Create zetabot Node
Subscribe to the “imu” Topic
Check message by dividing it into x, y, z, w values
def process_imu(msg):
rospy.loginfo("x: {},y: {},z: {},w: {}".format(msg.orientation.x, msg.orientation.y, msg.orientation.z, msg.orientation.w))
def start_node():
rospy.init_node('zetabot')
rospy.Subscriber("imu", Imu, process_imu)
rospy.spin()
try:
start_node()
except rospy.ROSInterruptException as err:
print(err)