Depth Estimation
카메라로 깊이 추정.ipynb
- Running the cell codeCtrl + Enter
import subprocess
Import the subprocess module
# Depth Estimation with Raspberry Pi Camera
detect_command_depth = 'bash ~/ai_example/detect.sh cam_depth'
subprocess.call((detect_command_depth.split('\n')), shell=True)
Depth Estimation with Raspberry Pi Camera
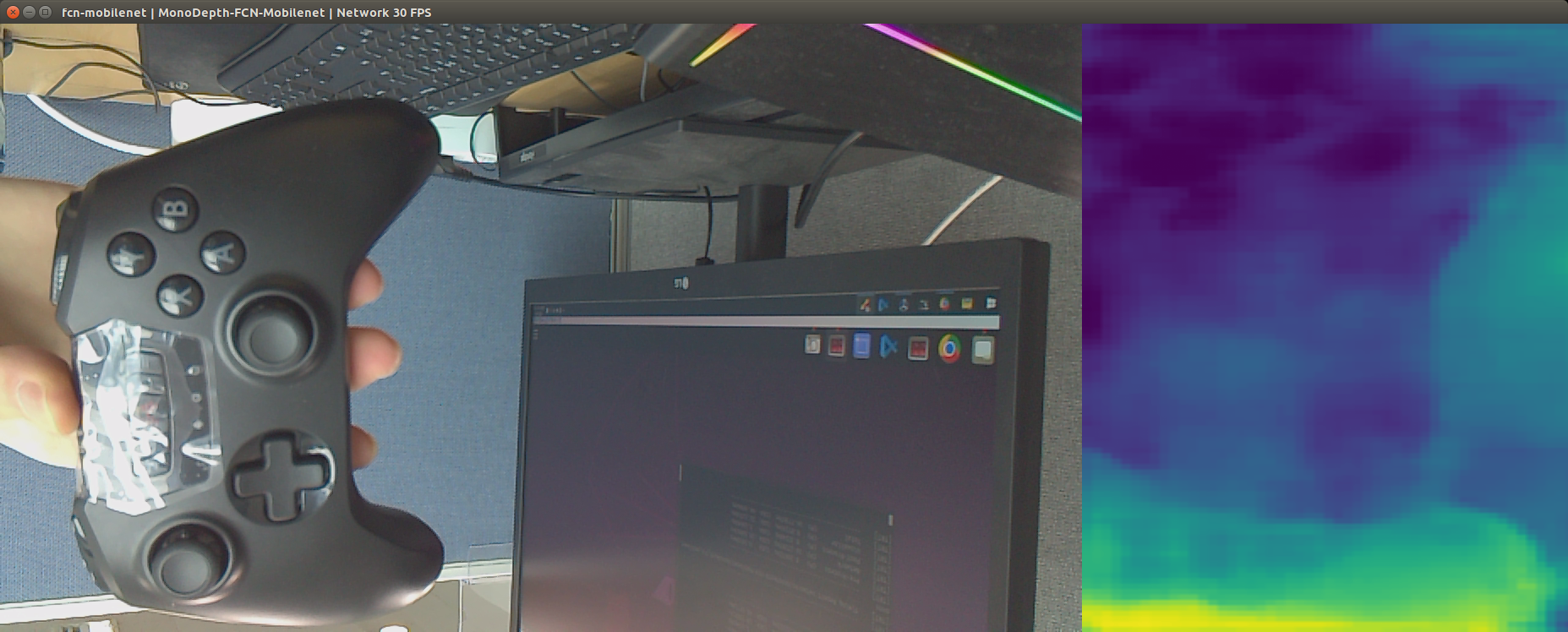
Executed on Jetson Nano
# terminating the process
kill_command_depth = 'bash ~/ai_example/kill.sh camera'
subprocess.call((kill_command_depth.split('\n')), shell=True)
Terminating the process