ROS Service Server
02_01_ros_service_server.ipynb
- Running the cell codeCtrl + Enter
from __future__ import print_function
from rospy_tutorials.srv import AddTwoInts,AddTwoIntsResponse
import rospy
Import print_function from __future__ module for Python3 compatibility
Import AddTwoInts, AddTwoIntsResponse from rospy_tutorials.srv module
Import rospy modules
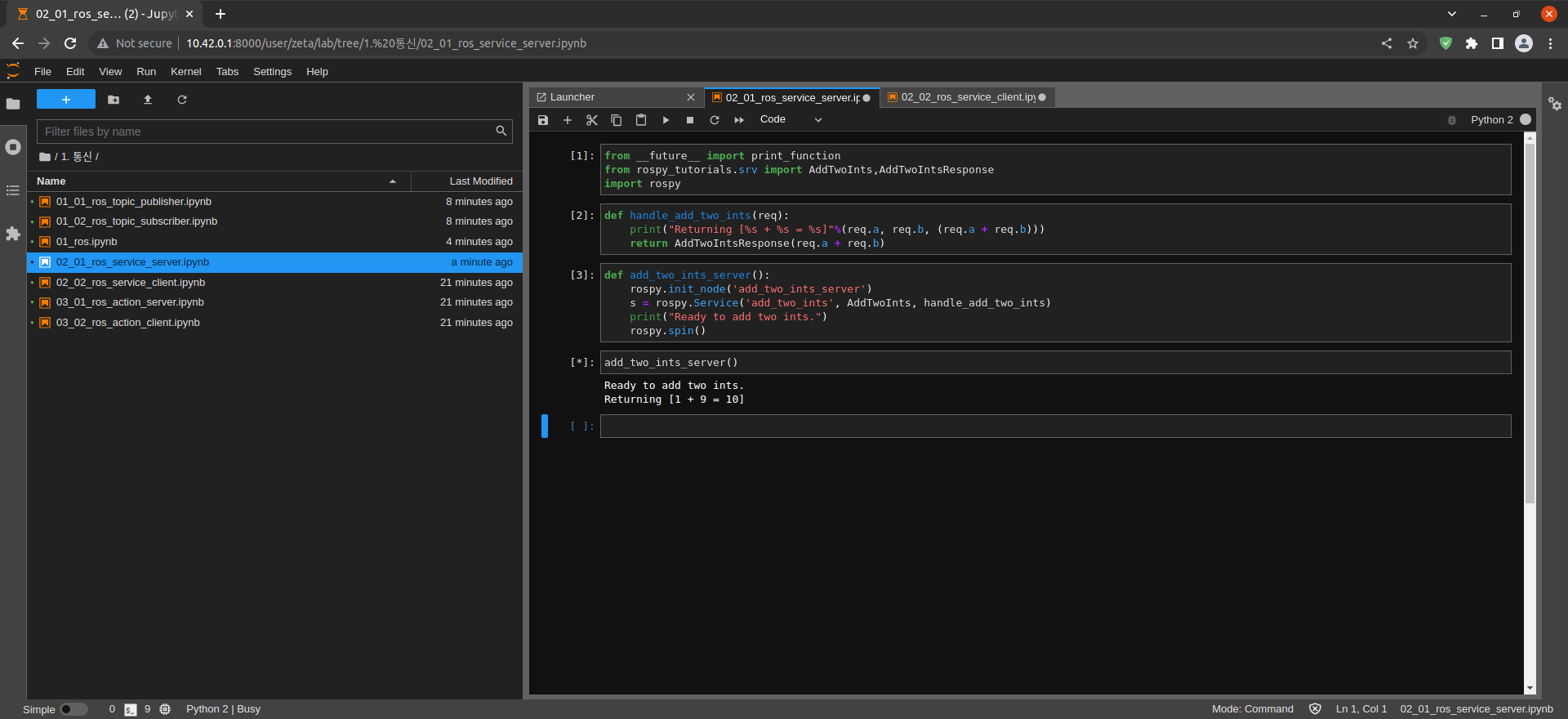
def handle_add_two_ints(req):
print("Returning [%s + %s = %s]"%(req.a, req.b, (req.a + req.b)))
return AddTwoIntsResponse(req.a + req.b)
Create handle_add_two_ints() function
Output req.a, req.b, req.a + req.b
Return instances of req.a + req.b in AddTwoIntsResponse
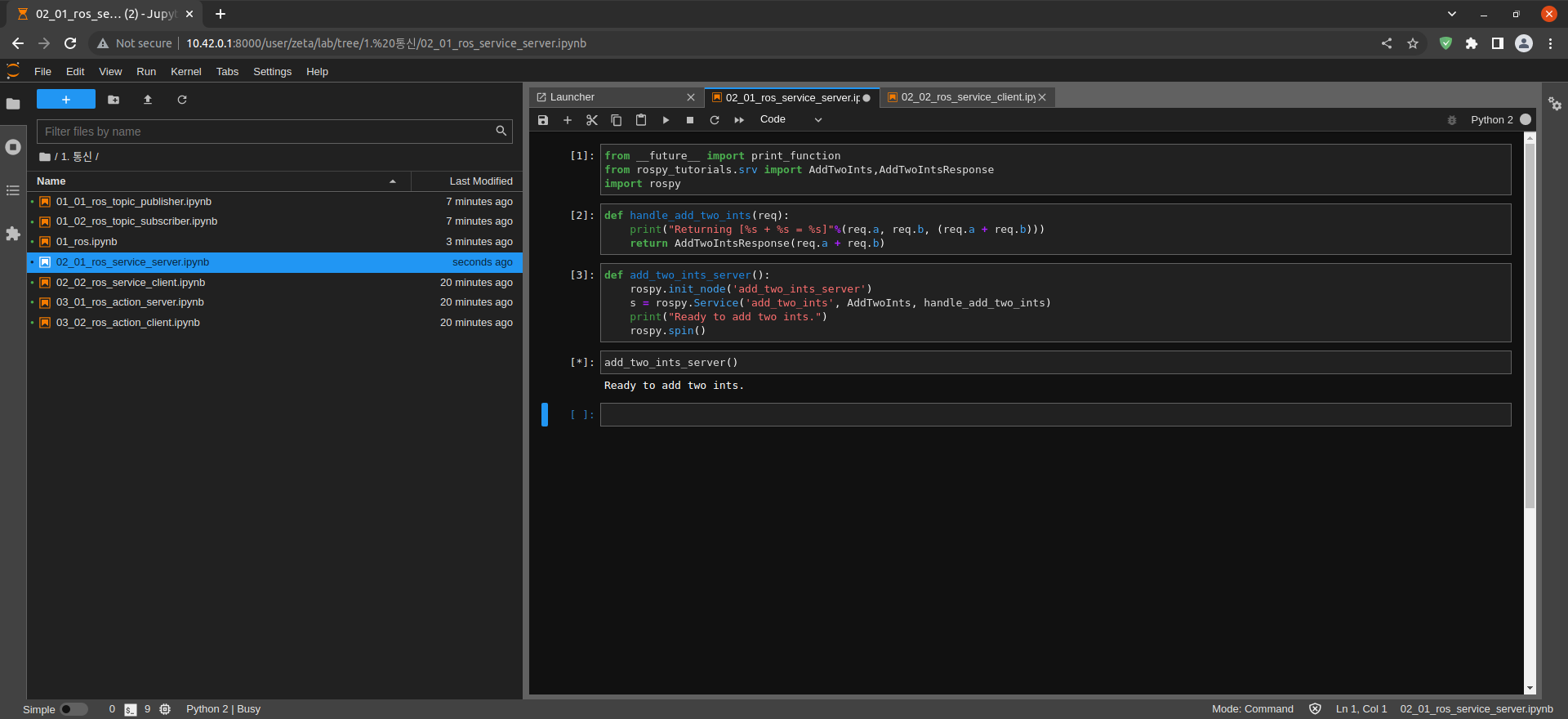
def add_two_ints_server():
rospy.init_node('add_two_ints_server')
s = rospy.Service('add_two_ints', AddTwoInts, handle_add_two_ints)
print("Ready to add two ints.")
rospy.spin()
Create add_two_ints_server() function
Create add_two_ints_server Node
Create add_two_ints Service
add_two_ints_server()
Create add_two_ints_server() function